Code Breakdown!
Step 1: Setup and definition
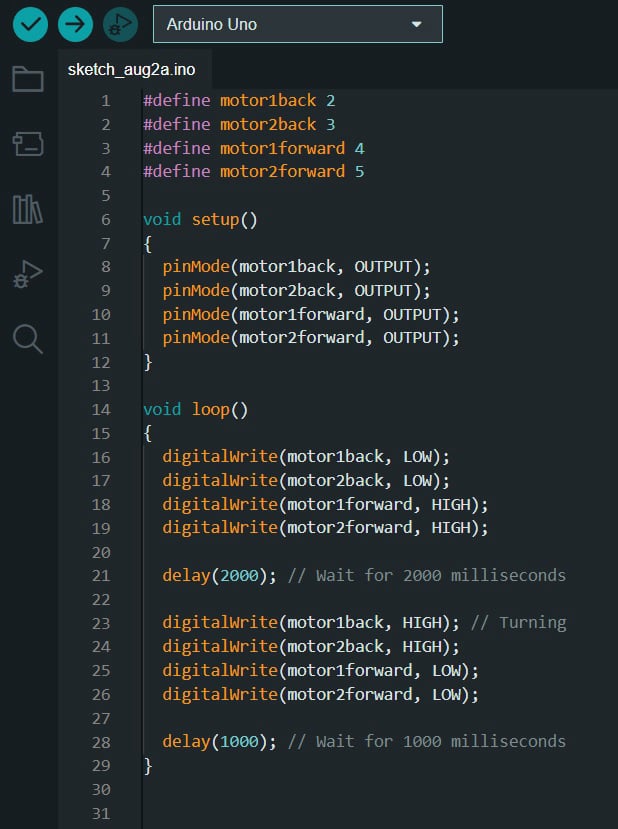
The #define preprocessor directives create symbolic names for the four motor control pins: motor1back (pin 2), motor2back (pin 3), motor1forward (pin 4), and motor2forward (pin 5).
In the setup() function, the four motor control pins are set as OUTPUT, indicating that these pins will be used to control the motors.
In the loop() function, the motors are controlled in the following pattern:
Step 2: Moving the motors forward
Pins 4 and 5 (motor1forward and motor2forward) are set HIGH to move the motors forward.
Pins 2 and 3 (motor1back and motor2back) are set LOW to ensure they are not active in this direction.
A delay of 2000 milliseconds (2 seconds) occurs using delay(2000);.
Step 3: Stopping the motors (moving backward)
Pins 4 and 5 (motor1forward and motor2forward) are set LOW to stop the motors from moving forward.
Pins 2 and 3 (motor1back and motor2back) are set HIGH to move the motors backward.
A delay of 1000 milliseconds (1 second) occurs using delay(1000);.
The loop then repeats, going back to Step 1 and moving the motors forward again, creating a continuous forward-backward motion pattern for the motors.